ITSES stands for Intelligent Traffic Signal Evaluation System.
The intelligent traffic signal control evaluation system independently developed by our research group can accurately evaluate the traffic control level of intersections, judge the causes of the problems, and analyze the improvement and optimization potential of traffic control schemes. It provides a decision-making basis for the construction and upgrading of urban traffic control system.
The system is based on the development mode of MVC, including model layer, control layer and view layer. Under the framework of Django, the intelligent algorithm, multi-source data management, map network, visual chart and so on are integrated by using Python, JavaScript, HTML and CSS languages. In the implementation of the function, the system is divided into the front end and the back end. The back end of the system mainly implements the deployment of related algorithms such as data processing, evaluation and diagnosis, optimization analysis and so on. The front end mainly provides users with a good interactive experience and visual display.
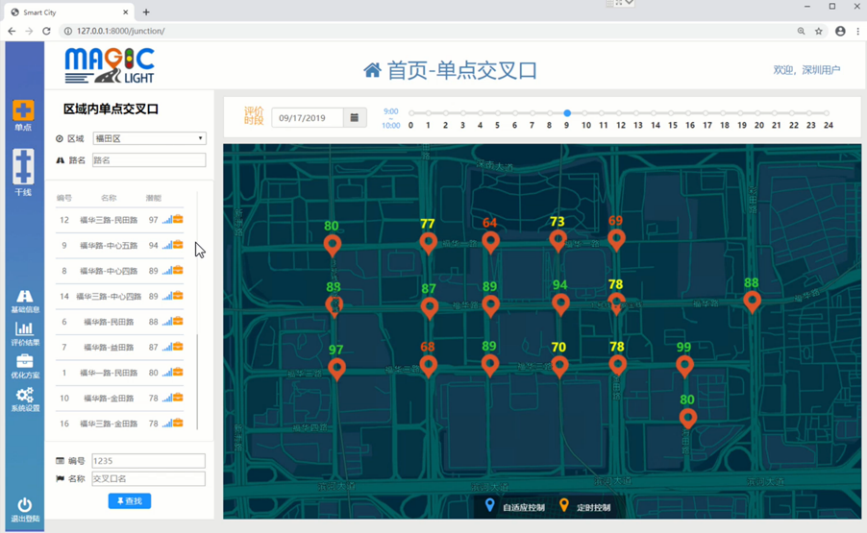
The front end display is shown below.
1.Overview of isolated intersections macro region
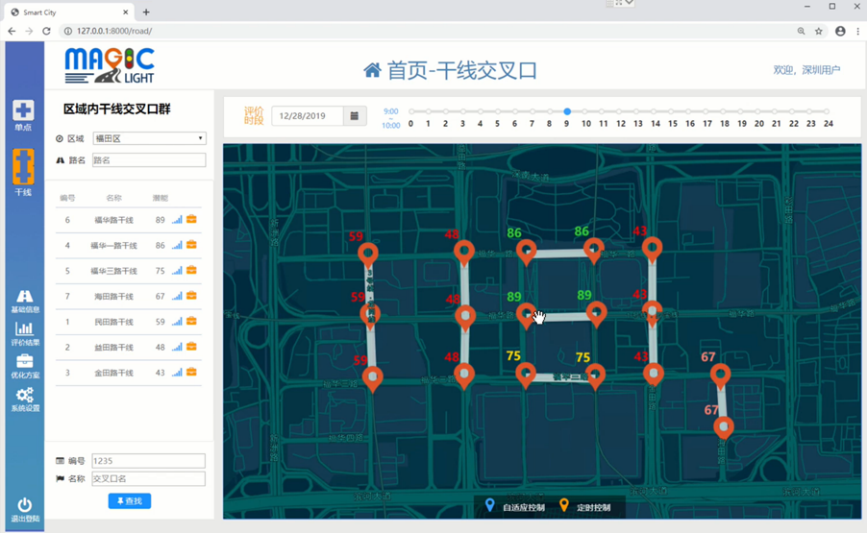
2.Overview of Macro-area of Trunk Line
3.Details of isolated intersection evaluation results

4.Details of trunk line evaluation results

The on-board Dead-up Display System developed by our group projects the virtual image on the transparent display device in the front visual field of the driver. The driver can obtain the relevant driving auxiliary information to realize the information interaction between the driver and the vehicle and the external environment. Therefore, it aims to reduce the reaction time of the driver, reduce the driving distraction, improve the driving performance and increase the driving safety. In the vehicle network environment, using HUD to access the safe driving assistance function, through the real-time interaction of human-vehicle-road information, the driver can obtain driving assistance information, so as to improve traffic safety and operation efficiency.
Head-up Display System is in the form of post-loading combination, using 3B + raspberry pie, which can provide rich serial ports, operation support, interface design and communication connection to help developers carry out in-depth research and development, continuously upgrade, and have ultra-bright display screen.Thirteen kinds of security auxiliary interfaces which can play an important role are proposed and designed.
The difference from the previous Head-up Display System is that it uses hardware equipment with both computing, communication and display functions, and has the advantages of higher processing speed, higher display clarity, supporting wireless communication and so on. Second, the interface functions are summarized and screened to show a more important security auxiliary interface. Third, when designing the interface, the overall layout is divided into two areas: conventional information display and random information display. The element combination design avoids a large number of invalid interfaces and ensures the unity of the interface. Common traffic icons, appropriate text symbols, fonts, colors and other forms are used to facilitate drivers to read.
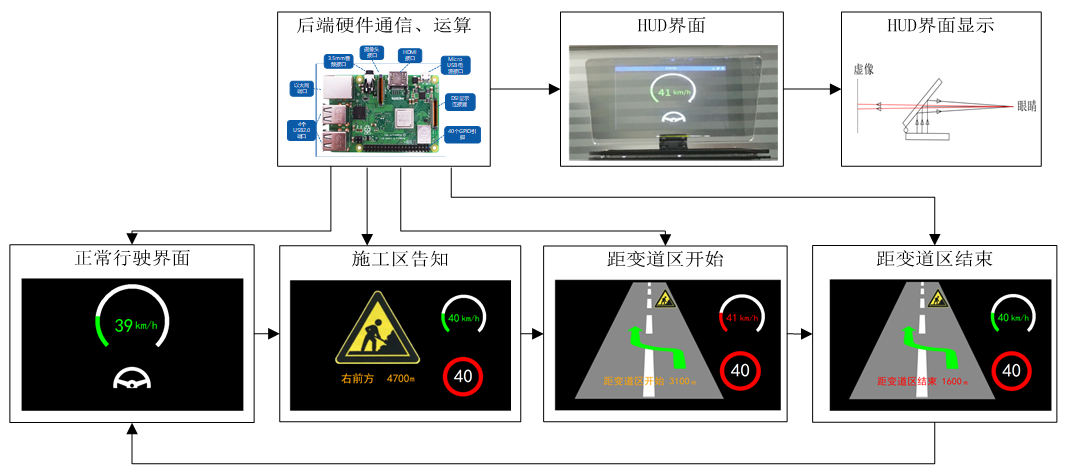
HUD Prototype machine:

Operation process of single condition early warning system (taking early warning in construction area as an example)
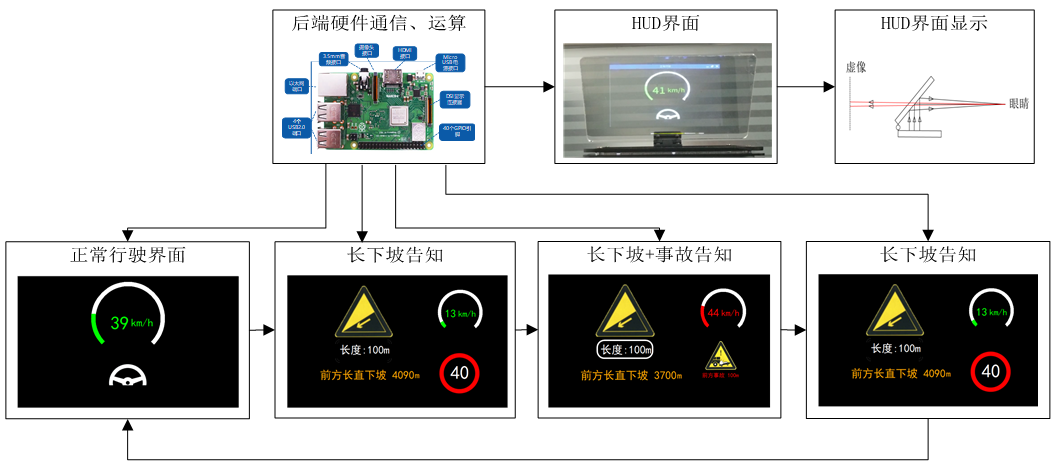
Operation process of multi condition early warning system:
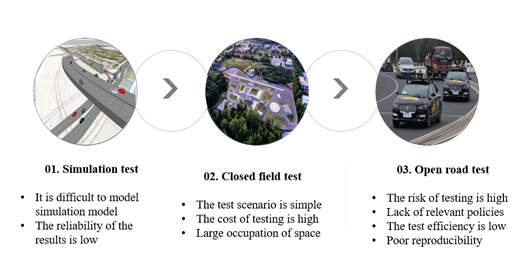
At present, the simulation of traffic environment is mostly concentrated on the pure model level. Compared with the real environment test, pure model simulation has a "congenital" advantage that can not be ignored. On the one hand, it can effectively avoid the dangerous scene in the real environment, and will not produce traffic accidents like Uber, Tesla and other tests. On the other hand, pure model modeling can simulate complex traffic scenarios In order to save the high construction cost of scene construction in the real environment, but pure model simulation also has its inherent shortcomings, which can not fully describe the details of the real traffic environment. At the same time, the description of the uncertainty in the real environment (such as friction, sunlight and other environmental factors) is relatively simple.
To solve this problem, MagicLab builds a traffic parallel simulation system. The system reflects all kinds of uncertain factors in reality into the simulation environment through synchronous operation of real traffic environment and simulation traffic environment. At the same time, the complex scene in the simulation environment is used to enhance the test ability of the real environment.
During the simulation operation, the system transmits the traffic information in the virtual environment to the OBU through v2x communication. After receiving the v2x information, the vehicle obtains the surrounding environment information and takes actions. Finally, it sends its own state to the system through V2I communication means. The system updates the virtual environment according to the information of the real environment to form a parallel synchronous virtual real simulation environment, In the process, all information communication is completed with standard message set (BSM, RSI, RSM, spat, map messages in t / CSAE 53-2017), which can restore the real scene to the greatest extent, and effectively improve the efficiency and security of simulation test.
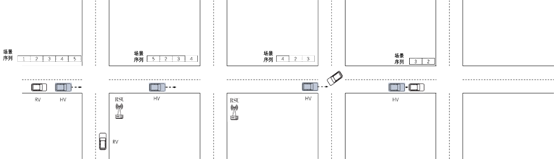
When the vehicle drives to the unsignalized intersection and there are vehicles in other directions that need to pass through the intersection, the roadside judges whether the two vehicles will collide. If it is judged that there is a collision risk, the vehicle with higher priority will pass first, and other vehicles will stop and wait.
In case of emergency braking of the vehicle ahead, broadcast the current emergency braking action and the current status of the vehicle to the surrounding vehicles. After receiving the information, the surrounding vehicles will quickly remind the driver to complete the collision warning.
Due to the factors such as open environment or closed field, the traditional vehicle road collaborative intelligent driving test results in high cost and high safety risk in the test process. The intelligent driving test model car of this product uses the micro technology to reduce the intelligent network vehicle to one tenth of the size, so as to realize the indoor test and development of the relevant algorithm of the intelligent network vehicle, including But it is not limited to the test, analysis and verification of single vehicle intelligent algorithm (vehicle positioning, path planning, etc.), network application algorithm (auxiliary driving, economic driving, priority control, etc.) and vehicle road communication algorithm.
Among them, the basic parameters of intelligent driving vehicle include: the maximum test time is 30 minutes, the communication delay is less than 50 ms, the control delay is less than 20 ms, the maximum weight is 5 kg, and the maximum speed is 50 km / h.

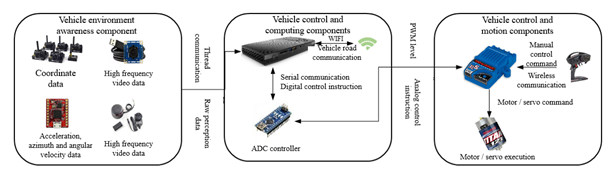
As shown in the figure below, the workflow of the intelligent driving test model car of this product is as follows:
1. The on-board computer processes the sensing data and vehicle road communication data through data fusion, mining and other algorithms, so as to obtain the surrounding environment status and its own state information
2. The computer generates the planning path and current control instructions (motor speed and servo angle) according to the surrounding environment status and its own state information, and sends them to the analog-to-digital converter through serial communication, which is converted into analog-to-digital converter with different frequencies and sends them to the on-board control electronic control system
3. The on-board control electric dispatcher sends current instructions to the motor and servo controller according to the instructions of manual and on-board computer to complete vehicle control.
Telephone:021-59980132
Email:2410194@tongji.edu.cn,2431730@tongji.edu.cn
Address: Tongda Building, No. 4800, Cao'an Road, Jiading District, Shanghai, China
Postcode:201804

@TONGJI MAGIC All rights reserved