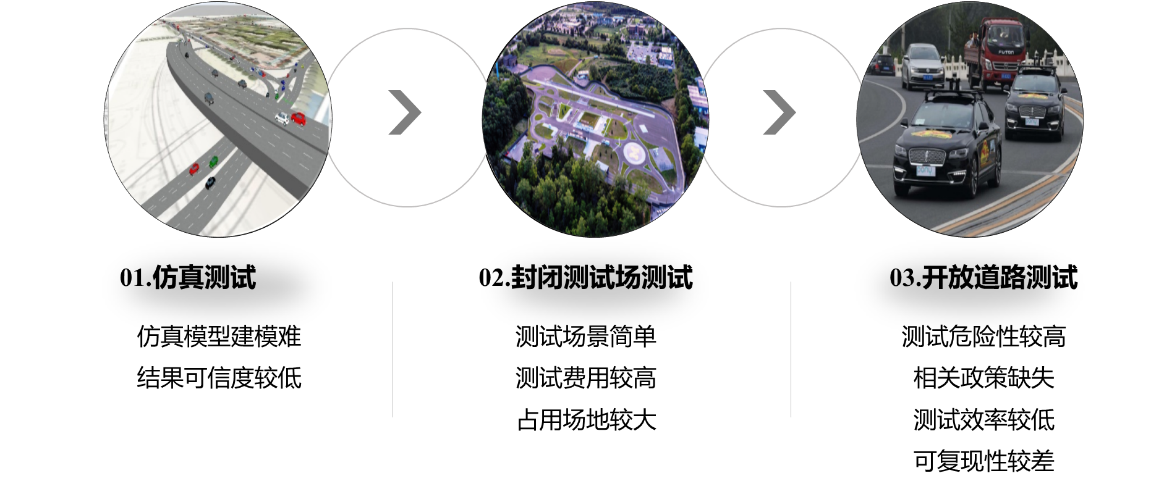
目前针对交通环境的仿真大多集中在纯模型层面,纯模型仿真相对于真实环境的测试有着不可忽视的“先天”优势,一方面其可以有效避免现实环境中的危险场景,不会产生类似Uber,Tesla等测试时发生交通事故的情况,另一方面纯模型建模可以模拟复杂的交通场景从而省去现实环境中场景搭建所产生的高昂的建设费用,但是纯模型仿真也有其固有的缺点,其无法全方位地刻画真实交通环境中的细节,同时对于现实环境中的不确定性(例如摩擦,阳光等环境因素)刻画较为单一。
针对这一问题,MagicLab搭建交通平行仿真系统,系统通过同步运行的现实交通环境和仿真交通环境,从而将现实中的各类不确定因素反映到仿真环境内部,同时利用仿真环境中的复杂场景增强现实环境的测试能力。
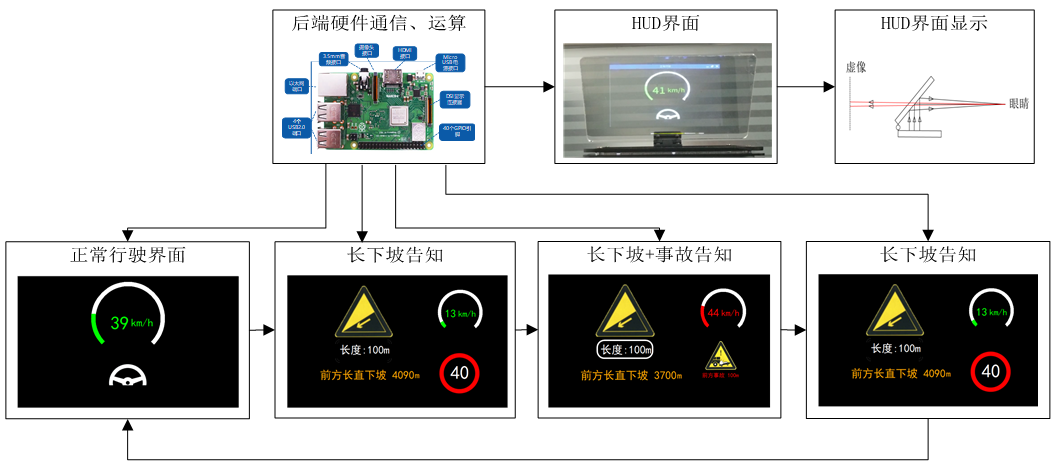
在仿真运行过程中,系统将虚拟环境中的交通信息通过V2X通信传输至OBU,车辆接收到V2X信息后结合自身感知栈获取周边环境信息并采取动作,最后将自身状态通过V2I通信手段发送至系统内部,系统根据真实环境的信息更新虚拟环境,形成平行同步的虚实仿真环境,过程中所有信息通信以标准的消息集(T/CSAE 53-2017中的BSM,RSI,RSM,SPAT,MAP消息)完成,最大程度上还原真实的场景,同时有效提升仿真测试效率和安全性。
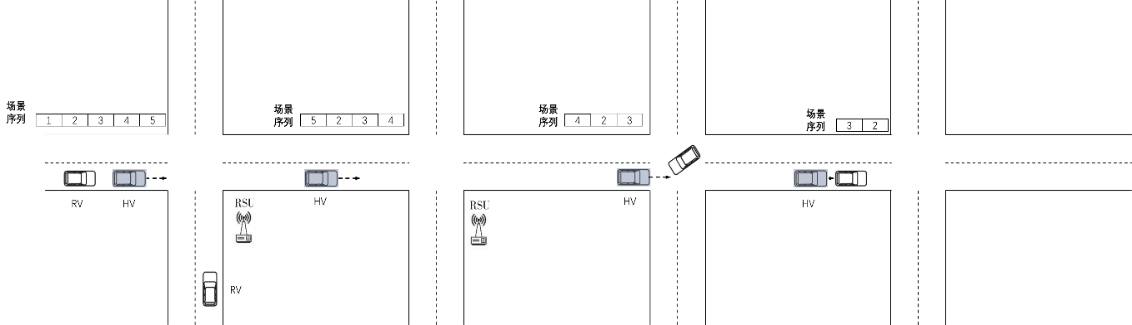
当车辆行驶至无信号交叉道口,其它方向同时也有车辆需要通过路口时,路侧判断两车是否会发生碰撞。如判断有碰撞危险,则让优先级高的车辆优先通过,其他车辆停车等待。
前方车辆发生紧急制动时,向周围的车辆广播告知当前紧急制动动作和车辆当前的状态,周边车辆接收到该信息后,快速提醒驾驶员,完成碰撞预警。